
About Me
Hello! I'm a passionate robotics and high-performance computing graduate exploring the frontier between intelligent algorithms, real-time systems, and scalable design.
I've recently finishing my Master's in Applied Science at Queen's University. My journey included applying data analysis tools like Excel, programming design and testing using ROS and ROS2 for robotics, and experience working with data center-sized systems.
With a background in electrical engineering and hands-on experience in Python, C, and C++, I aim to combine technical depth and creative problem-solving to develop high-impact solutions in robotics.
Affiliations


Research & Publications
Research centered at the intersection of robotics, real-time systems, and high-performance computing.
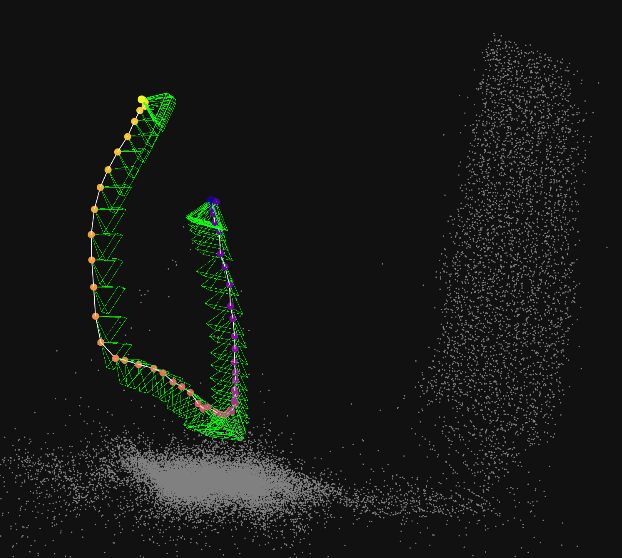
SHARP: Supercomputing for High-speed Avoidance and Reactive Planning
ICRA 2026
SHARP investigates whether high-performance computing can be used for reactive robot control without violating real-time constraints. Motion planning is offloaded to HPC clusters using a hash-distributed, multi-goal A* planner. The system enables millisecond-scale avoidance behaviors and reframes HPC offloading as a viable pathway toward dependable, reactive robots in dynamic environments.

Scaling Parallel Graph Computing for Real-time Robotics
ICS 2026 (in review)
This paper presents a systematic scaling analysis of a repre- sentative robotics planning algorithm, motivated by the emerging need for robots to leverage data center-scale compute resources. To study this interaction, we implement a hash-distributed multi- goal graph search that computes collision-avoidance trajectories. We evaluate its performance under stress, examining both strong and weak scaling across a range of graph sizes and process counts.
Projects
Selected robotics projects focused on artificial intelligence, robotics, and autonomous navigation.
VLA Development Pipeline and Evaluation
March 2023 - Present
Investigated the use of vision-language action (VLA) models for manufacturing applications.
Developed a pipeline through teleoperation using Mujoco in simulation to develop datasets for training robots.
Designed a methodology through demonstration and camera capture on real-world data through physical task execution using the end-effector to create trainable data.
Created notebooks and programs that detail the training steps and Google Colab notebooks for logging.

Mechanical Team Lead of Ingenuity Labs Racing
September 2025 - Present
Founding member of Ingenuity Labs Racing - a Roboracer autonomous racing vehicle challenge.
Managed physical upgrades to vehicle, maintenance, and on-the-fly adjustments.
Oversaw additional members design and creation of AutoCAD parts.
Assisted in layout design, programming, and troubleshooting of vehicle.
For more information on the Roboracer competition, see https://roboracer.ai/
Education & Experience
My Educational Journey and Work Experience
Donald A. Wilson Secondary School
2014 - 2018
Queen's University
2018 - 2023
Bachelor of Applied Science in Electrical Engineering, 2023
Ontario Power Generation
2021-2022
Professional Student Engineering Intern
Queen's University
2023 - Present
Master's of Applied Science in Electrical Engineering, March 2026 Projected
Skills
My Preferred Technologies and Tools
Python
C
C++
ROS & ROS2
Inkscape
Camtasia
Get in Touch
Feel free to reach out for collaborations or just to say hi.