SHARP: Real-Time Robotic Avoidance via Supercomputing
Offloading motion planning to HPC under millisecond-scale latency constraints
Motivation
Robots operating in close proximity to humans must react faster than human reflexes to ensure safety. However, onboard processors are constrained by power, thermal limits, and cost, restricting the complexity of real-time planning algorithms.
High-performance computing systems offer massive parallelism, but their use in reactive robot control is often dismissed due to concerns over network latency and unpredictability.
Core Challenge
The central question behind SHARP is not whether supercomputers can plan quickly, but whether they can do so fast enough and consistently enough for real-time robotic control.
- End-to-end latency must remain below human reaction time
- Network jitter must not dominate control deadlines
- Planning must integrate cleanly with onboard safety mechanisms
Approach
SHARP implements a hash-distributed, multi-goal A* planner using MPI and integrates it into a reactive control loop for a 7-DOF robotic manipulator.
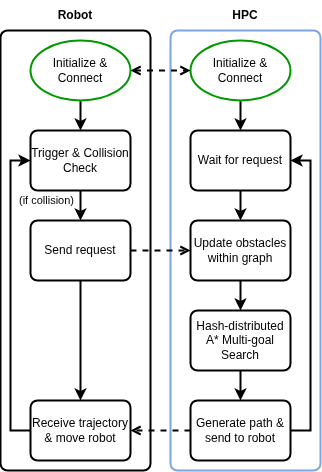
- Onboard system generates planning requests in real time
- Requests are distributed across HPC nodes for parallel search
- Candidate trajectories are returned under strict deadlines
- Low-level reflexes remain onboard to ensure safety
Experimental Results
These results demonstrate that when round-trip latency remains within tens of milliseconds, HPC-based planning can operate safely within real-time control loops.
Key Insight
SHARP shows that high-performance computing does not inherently conflict with real-time robotics. Instead, it enables a hybrid control architecture where scalable planning is offloaded.
This reframes HPC not as a batch-only resource, but as a viable component in future reactive robotic systems.